Publications
2020

[New] Use the Force, Luke! Learning to Predict Physical Forces by Simulating Effects
Kiana Ehsani, Shubham Tulsiani, Saurabh Gupta, Ali Farhadi, Abhinav Gupta
CVPR, 2020
pdf project page abstract bibtex

[New] Intrinsic Motivation for Encouraging Synergistic Behavior
Rohan Chitnis, Shubham Tulsiani, Saurabh Gupta, Abhinav Gupta
ICLR, 2020
pdf project page abstract bibtex

[New] Discovering Motor Programs by Recomposing Demonstrations
Tanmay Shankar, Shubham Tulsiani, Lerrel Pinto, Abhinav Gupta
ICLR, 2020
pdf abstract bibtex

[New] Efficient Bimanual Manipulation using Learned Task Schemas
Rohan Chitnis, Shubham Tulsiani, Saurabh Gupta, Abhinav Gupta
ICRA, 2020
preprint abstract bibtex video
2019

Object-centric Forward Modeling for Model Predictive Control
Yufei Ye, Dhiraj Gandhi, Abhinav Gupta, Shubham Tulsiani
CORL, 2019
pdf project page abstract bibtex

3D-RelNet: Joint Object and Relational Network for 3D Prediction
Nilesh Kulkarni, Ishan Misra, Shubham Tulsiani, Abhinav Gupta
ICCV, 2019
pdf project page abstract bibtex code

Order-Aware Generative Modeling Using the 3D-Craft Dataset
Zhuoyuan Chen*, Demi Guo*, Tong Xiao*, et. al.
ICCV, 2019
pdf abstract bibtex

Multi-view Supervision for Single-view Reconstruction via Differentiable Ray Consistency
Shubham Tulsiani, Tinghui Zhou, Alexei A. Efros, Jitendra Malik
TPAMI, 2019 (journal version combining DRC and MVC)
pdf abstract bibtex code

Hierarchical Surface Prediction
Christian Häne, Shubham Tulsiani, Jitendra Malik
TPAMI, 2019 (journal version of HSP)
pdf abstract bibtex code
2018

Learning Category-Specific Mesh Reconstruction from Image Collections
Angjoo Kanazawa*, Shubham Tulsiani*, Alexei A. Efros, Jitendra Malik
ECCV, 2018
pdf project page abstract bibtex video code

Multi-view Consistency as Supervisory Signal for Learning Shape and Pose Prediction
Shubham Tulsiani, Alexei A. Efros, Jitendra Malik
CVPR, 2018
pdf project page abstract bibtex code
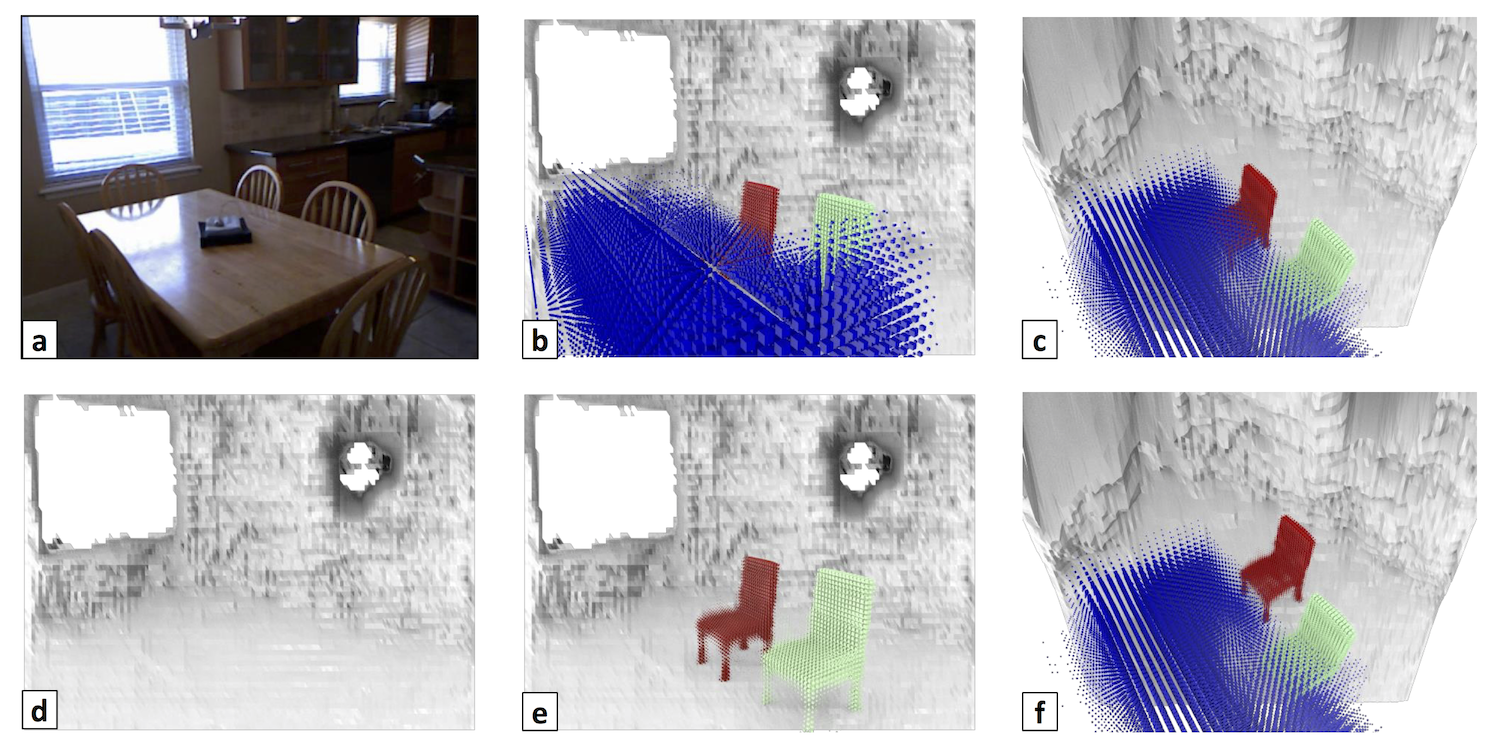
Factoring Shape, Pose, and Layout from the 2D Image of a 3D Scene
Shubham Tulsiani, Saurabh Gupta, David Fouhey, Alexei A. Efros, Jitendra Malik
CVPR, 2018
pdf project page abstract bibtex code
2017

Hierarchical Surface Prediction for 3D Object Reconstruction
Christian Häne, Shubham Tulsiani, Jitendra Malik
3DV, 2017
pdf abstract bibtex slides code
2016

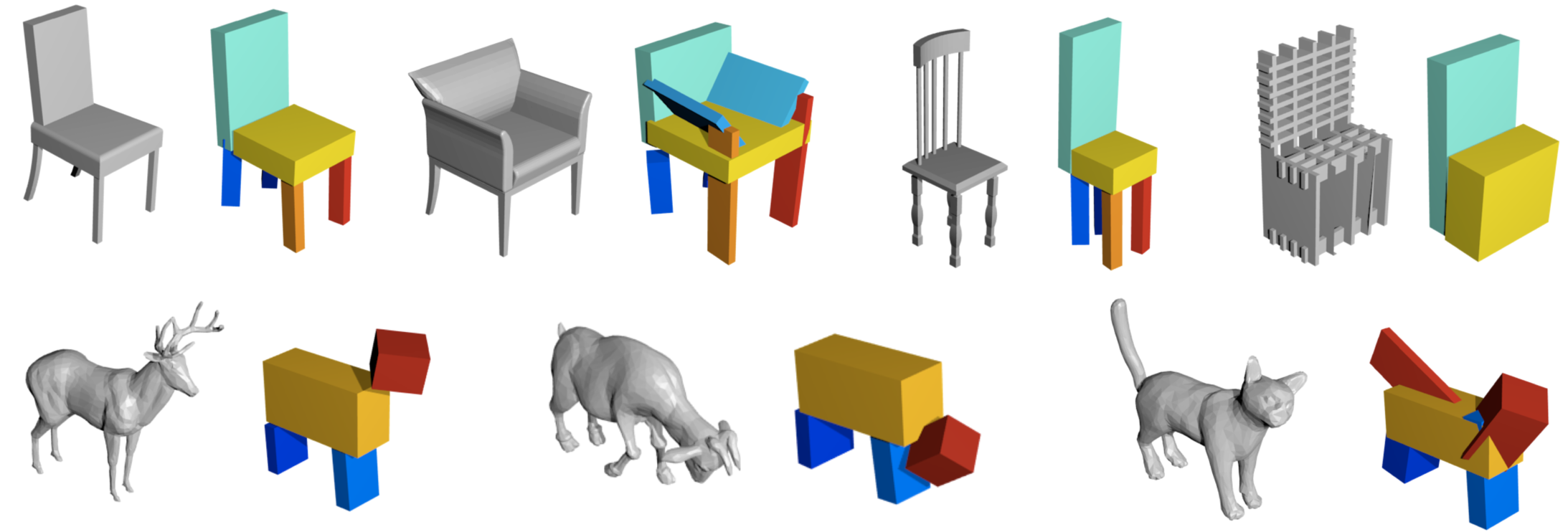
Learning Category-Specific Deformable 3D Models for Object Reconstruction
Shubham Tulsiani*, Abhishek Kar*, João Carreira, Jitendra Malik
TPAMI, 2016
pdf abstract bibtex code

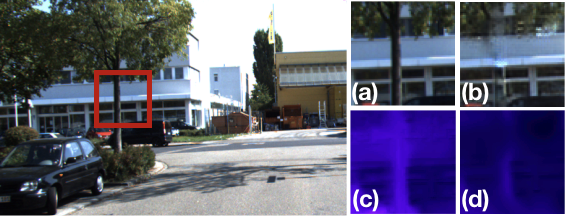
View Synthesis by Appearance Flow
Tinghui Zhou, Shubham Tulsiani, Weilun Sun, Jitendra Malik, Alexei A. Efros
ECCV, 2016
pdf abstract bibtex code
2015

Pose Induction for Novel Object Categories
Shubham Tulsiani, João Carreira, Jitendra Malik
ICCV, 2015
pdf abstract bibtex code

Amodal Completion and Size Constancy in Natural Scenes
Abhishek Kar, Shubham Tulsiani, João Carreira, Jitendra Malik
ICCV, 2015
pdf abstract bibtex

Category-Specific Object Reconstruction from a Single Image
Abhishek Kar*, Shubham Tulsiani*, João Carreira, Jitendra Malik
CVPR, 2015 (Best Student Paper Award)
pdf project page abstract bibtex code note

Virtual View Networks for Object Reconstruction
João Carreira, Abhishek Kar, Shubham Tulsiani, Jitendra Malik
CVPR, 2015
pdf abstract bibtex video code
2013

A colorful approach to text processing by example
Kuat Yessenov, Shubham Tulsiani, Aditya Menon, Robert C Miller, Sumit Gulwani, Butler Lampson, Adam Kalai
UIST, 2013
pdf abstract bibtex